 |
|||
|
|
|||
|
Page Title:
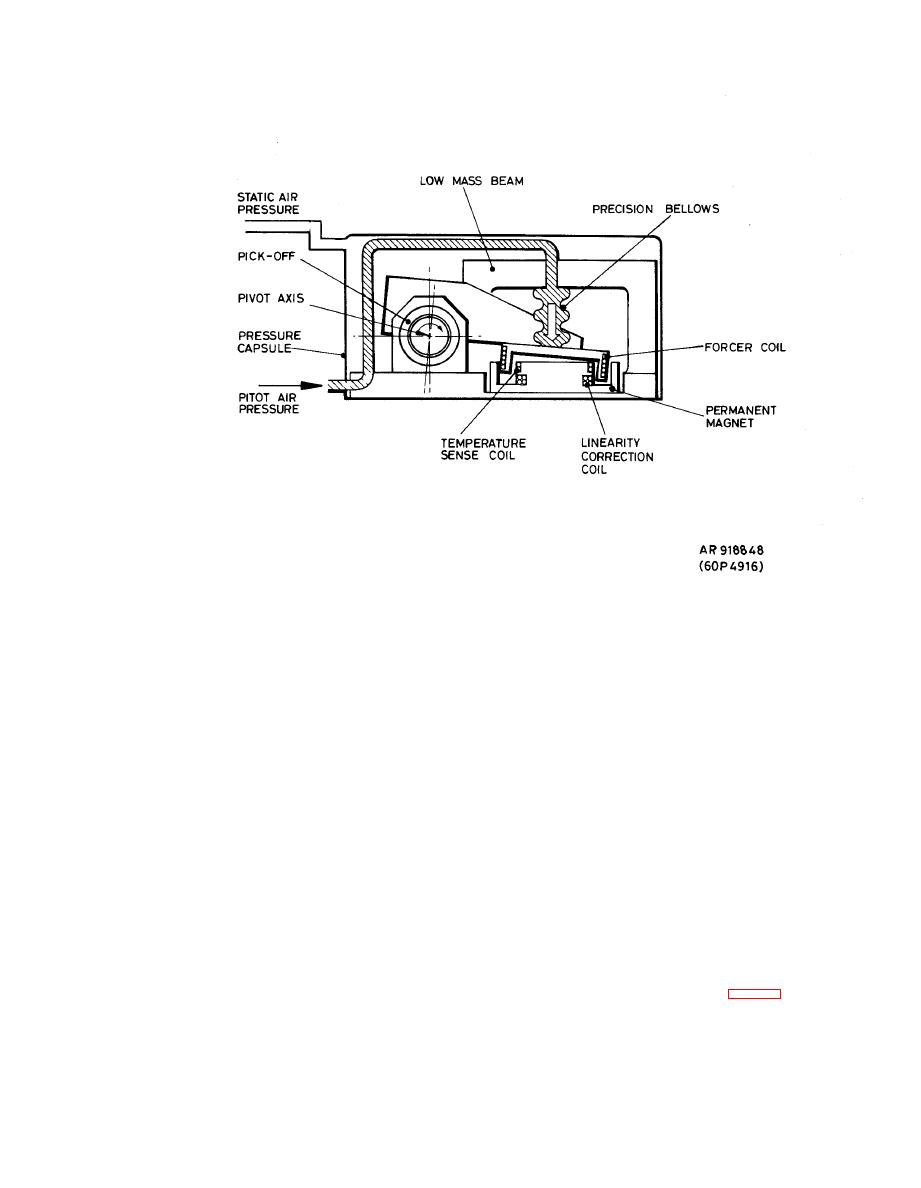
Figure 1-17. Force Balance Transducer. |
|
||
| ||||||||||
|
|
 TM
9-1270-219-13&P
permanent
magnet.
For
the
Pitot-Static
transducer,
pitot
c a p s u l e only, with the precision bellows being evacuated
p r e s s u r e is delivered to the interior of the bellows and
and sealed.
static pressure to the interior of pressure capsule. If the
P i t o t pressure is greater than the Static, the bellows will
(d) Response to pressure changes is very rapid. The
bellows range of movement is restricted to less than 0.002
attempt to expand, and cause the rotary pick-off to turn.
This minute rotation is sensed by the pick-off and the
i n c h total movement, therefore the bellows will not alter
in
length
by
any
detectable
amount
under
normal
resultant signal is detected by the control electronics
operation
conditions.
which
supplies
feedback
current
to
the
forcer
coil
to
r e t u r n bellows and beam to the original (null) position. A
drop in pitot pressure will have the reverse effect (less
(e) A small temperature-sensing coil is mounted
within each transducer so that transducer temperature
current will be required by the forcer coil).
may be monitored by the CPU.
(a) The current required to null the pick-off is
(2) C o n t r o l L o o p E l e c t r o n i c s . The printed circuit
proportional to the pressure difference, and this current
card
contains
control
loops
to
drive
the
transducers
voltage
buffers
and
Programmable
Read
Only
Memories
v a l u e is m o n i t o r e d by th e PT U con t r o l loo p ele c t r o n i c s .
(PROM), to supply the CPU with information for each
transducer's
temperature
response
(b) Output linearity of the transducer is improved
by supplying the Linearity coil, mounted in the magnet
(a) A 5kHz oscillator drives the rotary pick-off
assembly, with a proportion of the forcer coil's current.
primary coil. The phase of the induced signal in the
(c) The static transducer functions in a similar
secondary
alters
with
respect
to
the
primary
as
the
manner, but differs in that pressure is supplied to the
pick-off turns from its null position. The phase-shift is detected
|
|
Privacy Statement - Press Release - Copyright Information. - Contact Us |
