 |
|||
|
|
|||
|
|
|||
| ||||||||||
|
|
 TM 5-6675-250-34
Test
Signal
Jack
In conjunction with failure analysis instructions
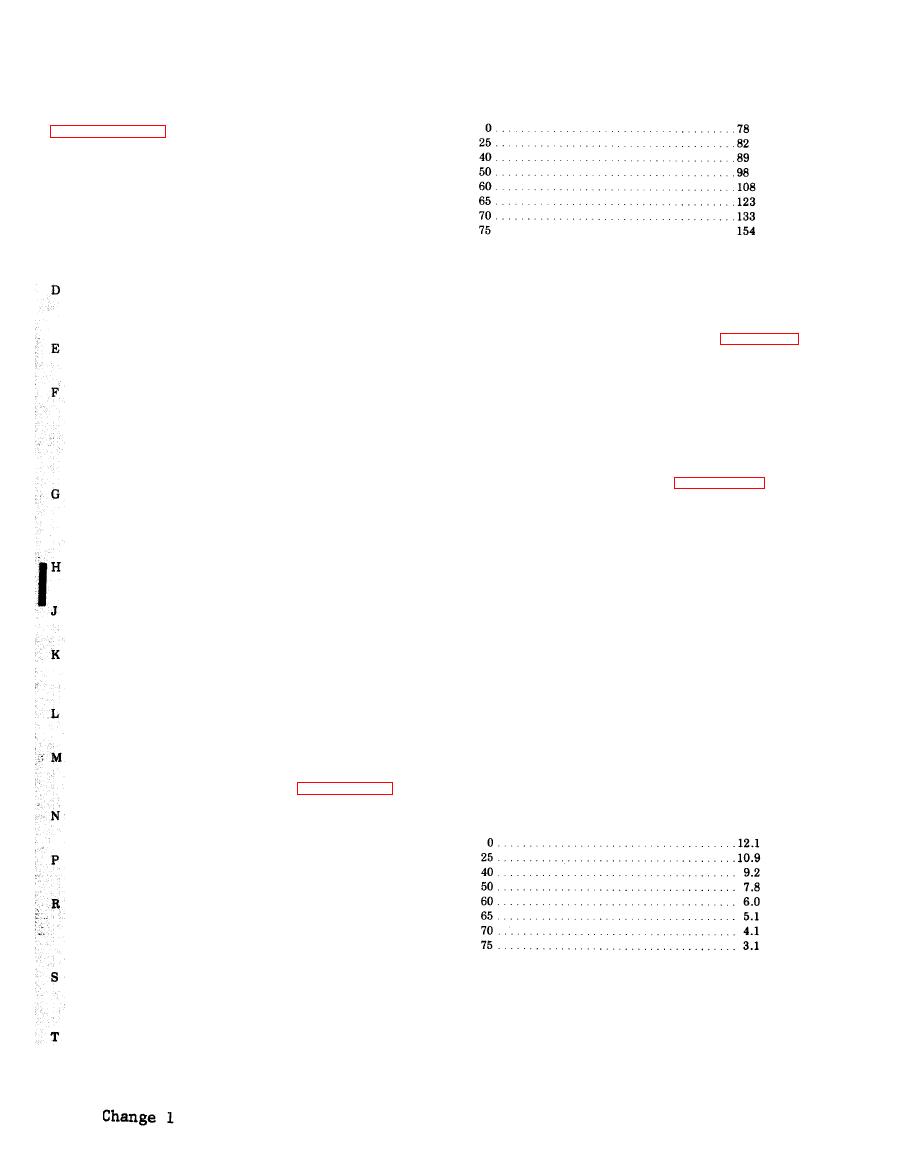
Setting
Delay (sec)
a r e provided to facilitate the isolation of defects
when troubleshooting. The modes of operation in
w h i c h the signals are active are indicated in the
s u b s e q u e n t paragraph. Test jacks A, B, and C are
spares. The function of all other jacks and associated
signals are as follows:
Servo amplifier output (one side) - Same as pin R (the ac
U
Test
signal will be 180 out-of-phase with pin R when
Signal
Jack
observed with an oscilloscope).
Uncage light high side - A positive dc voltage measured
Servo motor and tachometer excitation return - This wire
V
with respect to pin M; the panel illumination control
is connected to ground in the ECU and carries 400 Hz
varies this between 14 Vdc and 28 Vdc; measured
current; an ac ammeter placed in this line will read
with a dc voltmeter or oscilloscope.
0.155 amps. Refer to resistance check (paragraph 2-
Time totalizar meter high side - 26 Vac, 400 Hz when
16a) for additional measurements.
measured with respect to pin F; measured with an ac
Tachometer output This is a 400 Hz signal with a +9
W
voltmeter or oscilloscope.
Vdc component, measured with an oscilloscope with
Gyro motor return - This wire is connected to ground in
respect to pin X.
the ECU but a small 400 Hz signal can be seen when
Servo Motor:
measured with respect to pin X; measured with an
Stopped - Less than 0.02 peak to peak
oscilloscope (the amplitude of the signal depends upon
Full Speed - Greater than 2.7 peak to peak
the current through the wire and will vary from mode
Signal ground (No. 1 GND) - This line supplies power to
X
to mode); an ac ammeter placed in series with the line
the pre-amplifier and is the primary reference for the
wilf record currents up to 0.5 amps.
system. Refer to resistance check (paragraph 2-16a) for
Gyro motor high side - An ac current normally 0.23
measurement.
amps but increasing to as much as 0.5 amps during
NOTE
gyro runup; measured with an ac ammeter in series
The best way to monitor Y and Z is to insert a dc
with the line (this current is monitored in the SELF
ammeter in either line and check for a current
TEST gyro position).
variation of 0.2 ma as the bias pot is rotated
through its entire range.
Deleted.
Y
Bias coil (one side) - This line is connected to the bias
pot and can be varied between zero and +18 Vdc
Tilt switch - This line is connected to ground (pin M) if
measured with respect to pin X using dc voltmeter.
the reference unit is tilted at least 10, this should be
Z
Bias coil (one side) - A dc voltage varying between 60
measured in the power off mode using an ohmmeter.
mv when measured with respect to pin Y (changes with
Uncage switch hot side - This line is connected to the
bias pot position) using a dc voltmeter).
source voltage through the mode select switch and is
a
Torquer coil (one side) - A dc current varying between
measured with respect to pin M; measured with a dc
380 ma depending upon mode and condition of
voltmeter or, oscilloscope.
operation; measured with a dc ammeter in series with
Uncage switch switched side - This line is connected to
line.
pin K when the pendulum is fully uncaged; measured
Torquer coil (one side) - same as pin a.
b
the same as pin K.
Excitation coils high side - 26 VAC, 400 Hz measured
c
DC power ground (No. 2 GND) - This line is the return
with respect to pin F; with an ac voltmeter or
for dc current in the GRU (expecting the gyro brake
oscilloscope.
current). Refer to resistance check (paragraph 2-16a)
Torquer reference coil - A dc current with a specific value
d
for measurement.
of each latitude setting; use a dc ammeter.
Uncage solenoid high side - A dc voltage slightly less
Setting
Current (ma)
than the source voltage and measured with respect to
pin M; measured with a dc voltmeter.
Servo motor and tachometer excitation high side - A 26
vac, 400 Hz measured with respect to pin V; measured
with an ac voltmeter or oscilloscope.
Servo amplifier output (one side) - A 400 Hz signal with
a dc voltage component which is slightly less than the
source voltage (the amplitude of the ac signal will
d e p e n d upon servo speed); measured with an
e
+9 VDC - A regulated dc voltage measured with respect
oscilloscope referenced to pin M.
to pin X.
B+ to servo motor and speed changer high side - A
DC: 9 0.1 Vdc
positive dc voltage equal to the source voltage
Ripple: 40 m V peak to peak (maximum)
measured with respect to pin M; measured with a dc
Measured with a dc voltmeter and an oscilloscope.
voltmeter.
f
Pre-amplifier output GRU - A 400 Hz signal with 9 Vdc
Speed changer low side - A dc voltage equal to pin S or
component; the ac signal amplitude will depend upon
zero, volts depending upon whether the speed changer
the angular displacement of the follow-up assembly,
is energized; measured the same as pin S. Timing
with respect to the pendulum; measured with an
signals to the speed changer match the setting of the
oscilloscope with respect to pin X.
LATITUDE switch:
|
|
Privacy Statement - Press Release - Copyright Information. - Contact Us |
